SM3A: Servicing Tasks Performed using the RMS
 Date: 21 December 1999
Copyright: NASA
Show in archive: true
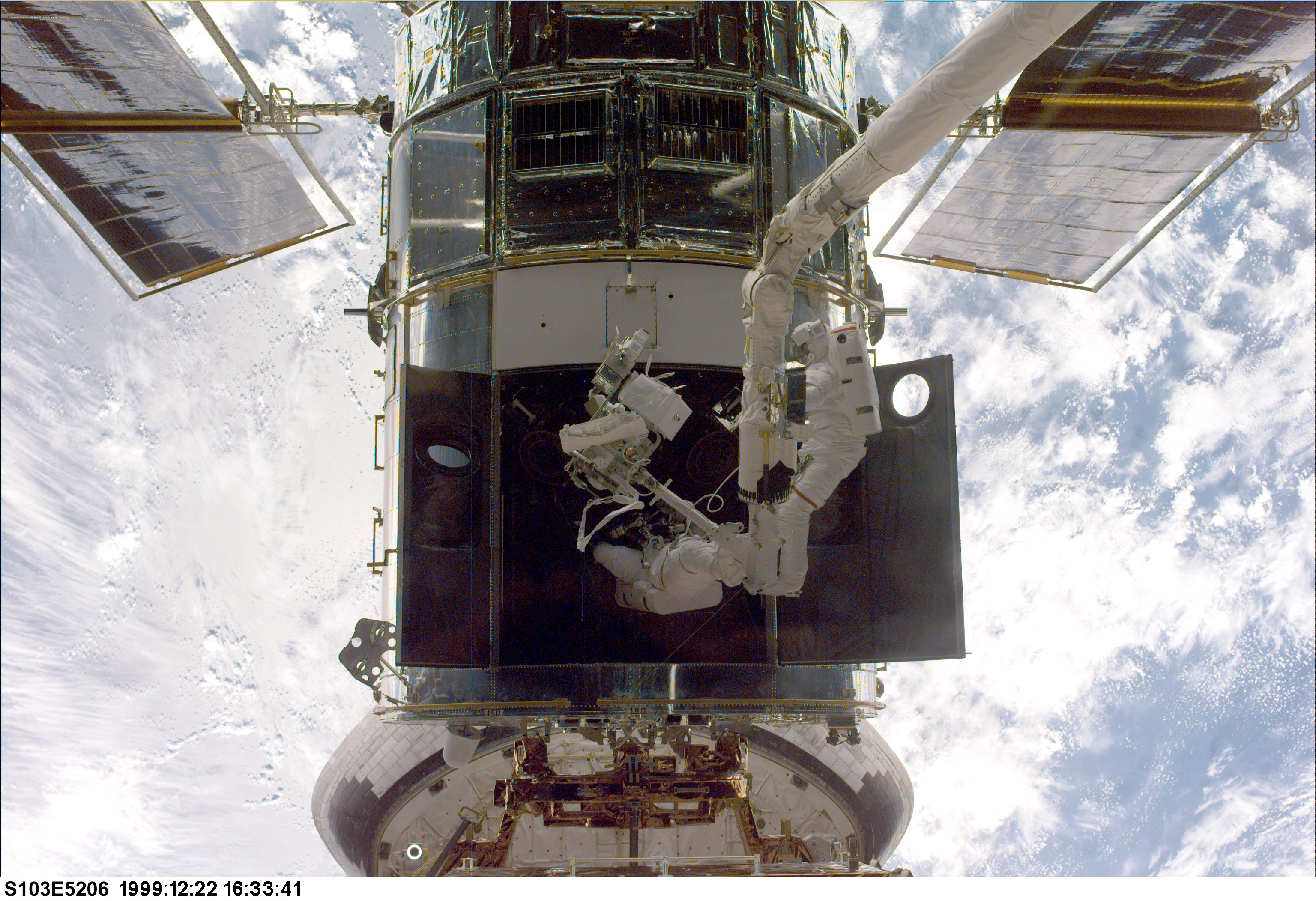
Astronauts Steven L. Smith (right), payload commander, and John M. Grunsfeld use the Canadian-built remote manipulator system (RMS) robot arm to perform servicing tasks on the temporarily captured Hubble Space Telescope (HST).
Date: 21 December 1999
Copyright: NASA
Show in archive: true
Astronauts Steven L. Smith (right), payload commander, and John M. Grunsfeld use the Canadian-built remote manipulator system (RMS) robot arm to perform servicing tasks on the temporarily captured Hubble Space Telescope (HST).
Last Update: 1 September 2019
{kind=link}
{kind=link}