Operations
SMILE is equipped for remote-sensing observations of the magnetosphere and its surroundings, imaging of Earth's auroras, and in situ measurements of the solar wind plasma and magnetic field – simultaneously.
This multi-faceted goal shapes the spacecraft's orbital parameters. SMILE must reach a high enough altitude to view the outside edge of Earth's magnetopause and at the same time obtain good spatial resolution of the auroral oval.
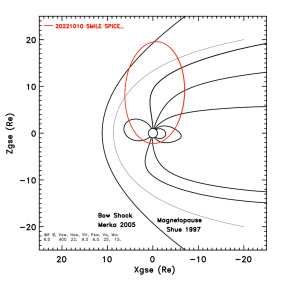 |
| SMILE's operational orbit. Credit: ESA |
The chosen orbit is therefore highly elliptical and highly inclined (70 or 98 degrees depending on launcher), and takes SMILE a third of the way to the Moon at apogee (an altitude of
SMILE will be injected into a low Earth orbit by a Vega-C or Ariane 6 launcher from Kourou, and a propulsion module will bring the spacecraft to the nominal orbit with perigee altitude of around 5000 km and an apogee altitude of around 19 RE (121 182 km).
The spacecraft and instruments will be operated by the CAS SMILE Mission Centre (MC), according to the timeline delivered by the CAS Science Application System (SAS). The MC will also store all the commands and data sent to and received from the spacecraft – the averaged total data rate for the SMILE payload is 171 kbps, equivalent to 32 Gbit per orbit. SAS will coordinate instrument observations and distribute data. The ESA Science Operation Centre (SOC) at ESAC will also receive and distribute data.
The nominal mission lifetime for SMILE to achieve its science goals is three years.