Engineering
Introduction
The objective of the spacecraft design is to satisfy the Venus Express mission requirements while making extensive reuse of the Mars Express design, so deriving cost benefits through recurrence and minimising development risks. As a consequence, the Venus Express spacecraft has the following similarities to Mars Express:
- System concept - body mounted instruments, fixed communications antennas, two solar arrays with one degree of freedom pointing mechanisms
- Structural design - minor, local changes to accommodate the revised instrument payload
- Propulsion subsystem - higher fuel load to meet more stringent delta V requirement
- Avionics units - limited changes to reflect new mission profile
- Operational concept - alternating between Venus observation during specific portions of the orbit and Earth communication and battery charging at other times
However, there are some Venus Express mission characteristics that led to design changes, primarily in the areas of thermal control, communications and electrical power:
- Science mission - additional and/or revised instruments needed to be accommodated (MAG, VeRa, VIRTIS and VMC) and two instruments that were design drivers for Mars Express were removed (BEAGLE and MARSIS)
- Proximity to the Sun - since Venus is closer to the Sun than Mars (0.72 AU instead of 1.5 AU), the radiant heating of the spacecraft is four times greater for Venus Express, the ionising radiation environment is harsher and the illumination of the solar panels is more intense
- Configuration of planets - in Mars orbit, the Earth vector is always within ± 40 degrees of the Sun vector, which assists with keeping the spacecraft cold face pointed away from the Sun during Earth communication, while, in orbit around an inner planet such as Venus, this convenience is not available
- Distance to Earth - Venus maximum distance from Earth is less than Mars (1.7 AU compared to 2.7 AU)
- Gravity - Venus gravity is greater than that of Mars (90% of Earth gravity instead of 38%), which led to a greater change in velocity being required for orbit injection (with a consequent propellant mass increase) and led indirectly to a longer orbital period (approximately 24 hours as opposed to 7 hours) and higher velocity at pericentre (about 9 km s-1 instead of 4 km
s-1 )
Structure
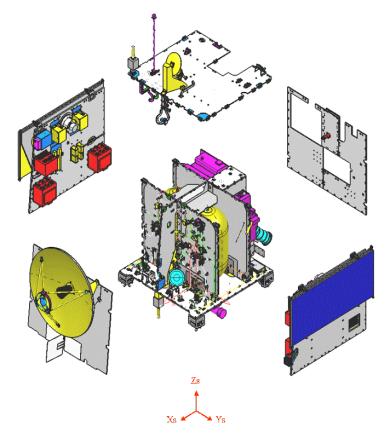
The Venus Express spacecraft is roughly a cubic box (dimensions 1.65 m x 1.7 m x 1.4 m high). The overall configuration of the spacecraft is a core structure, surrounded by an outer structure.
 |
|
Structure of Venus Express spacecraft |
The core structure comprises:
- A Launch Vehicle Adapter (LVA) ring, machined from a solid aluminium cylinder approximately 940 millimetres in diameter and 200 millimetres high, which formed the main load transfer path from the spacecraft body to the launch vehicle interface
- Two tank beams supporting the lower bosses of the propellant tanks and embedded in the LVA ring
- Two upper tank floors, supporting the upper bosses of the propellant tanks
- One Lower Floor
- One shearwall in the Y direction, providing stiffness in the X-Z plane
- Two shearwalls in the X direction, each one split in two panels and providing stiffness in the Y-Z plane
The spacecraft is divided into six compartments by the walls of the core structure.
The outer structure comprises:
- The top floor (+Z face)
- The ±Y sidewalls, which were open during spacecraft integration
- The ±X lateral closure panels, which are divided into three sections each to allow separate access into the various compartments of the spacecraft
- Various dedicated equipment support panels and brackets
All these elements are made of aluminium alloy, either from forgings (LVA ring, tank beams and main brackets) or from honeycomb sandwich panels. The panels are made from honeycomb of ten to twenty millimetres thickness, bonded to aluminium face sheets with a thickness varying between 0.2 and 0.3 millimetres, with up to 0.5 millimetres of additional thickness for local reinforcements.
The payload units are accommodated according to their main needs. Payloads needing stringent thermal control and/or pointing performances (PFS, SPICAV and VIRTIS sensors) are gathered in the -X compartment, close to the -X cold face of the spacecraft and to the Attitude and Orbit Control System reference units (the inertial measurement units and the star trackers).
The MAG sensors and deployable boom are accommodated outside the spacecraft, on the top floor. The ASPERA-4 sensors are accommodated on the lower floor and the -Y sidewall.
The propulsion system accommodation is the same as on Mars Express. The two propellant tanks are mounted in the centre part of the core structure and the propulsion units are accommodated on the +X shearwall and on the lower floor. The main engine is located under the lower floor and orientated in the -Z direction, while the eight thrusters are located at the four lower corners of the spacecraft.
The two solar wings are mounted to the ±Y sidewalls and can rotate around the Y axis (same interfaces as Mars Express).
There are two fixed high gain antennas. The HGA1 antenna is accommodated on the +X closure panel, as is the case on Mars Express. The HGA2 antenna is accommodated on the top floor, pointing in the -X direction.
The majority of the electronics units are accommodated on the inner side of the ±Y sidewalls.
Thermal Control
The spacecraft thermal control system is responsible for maintaining all spacecraft equipment within the allowed temperature range during all phases of the mission. The equipment falls into two categories:
- Collectively controlled units, for which the heat rejection and heating capabilities are provided by the spacecraft thermal control system
- Individually controlled units, provided with their own thermal control features (coatings, heaters, and insulation, for example) for which the spacecraft design maintains the thermal interfaces within the required limits
The thermal design of Venus Express uses a passive control concept having the maximum possible commonality with Mars Express. However, some system and design modifications have been implemented to cope with Venus's inner orbit and hotter environment.
Since Venus is closer to the Sun than Mars, the heating of the spacecraft due to solar infrared radiation is increased. While the infrared flux due to Venus is far lower than that from Mars (and remains constant), the albedo flux is significant during the operation phase around orbital pericentre. To cope with the harsher thermal environment, the following changes were made in the design of the thermal control system on Venus Express as compared to that on Mars Express:
- Low solar absorptance and low ageing coatings were used wherever possible
- Radiator areas have been increased and their efficiency has been improved by the replacement of Indium Tin Oxide (ITO) Second Surface Mirror (SSM) technology with Optical Surface Radiator (OSR) materials
- Multi-layer Insulation (MLI) efficiency has been improved: the external layer coating is white, as opposed to black, and a twenty three layer blanket is used
- Surface treatment of the Launch Vehicle Adapter (LVA) was changed to minimise the LVA ring temperature when Sun illuminated
- Heat pipes are used to connect the Power Control Unit and Power Distribution Unit to an enlarged radiator
- OSR materials are used on the rear of the solar array panels and between the cells on the front of the panels
An additional design change was made to take account of the fact that Venus is an inferior planet (its orbit lies inside that of the Earth), while Mars is a superior planet. For a spacecraft in orbit around Mars, the Earth vector is always within ± 40 degrees of the Sun vector, which allows the spacecraft cold face to be kept pointed away from the Sun during Earth communication. In orbit around an inner planet such as Venus, it is not possible to perform Earth pointing of a single, fixed antenna for all planetary configurations while keeping the spacecraft cold face in permanent shadow. To overcome this problem, a second High Gain Antenna has been added to Venus Express for communication when the spacecraft is in the part of its orbit near inferior conjunction (closest to the Earth).
Electric Power
The Venus Express electrical system is designed to satisfy the design driving requirements of an interplanetary spacecraft mission:
- High autonomy, due to the absence of real time control of the spacecraft from Earth
- Ability to cope with a highly variable environment, in particular, a wide variation in the intensity of sunlight on the solar panels
Power Generation
Electrical power is generated by two symmetrical Solar Array wings of two panels each, with a total area of 5.7 square metres and equipped with triple junction Gallium Arsenide cells. The Solar Array wings were stowed for launch, clamped to the spacecraft side panels by four hold down and release mechanisms. For deployment, each wing was released individually by pyrotechnic bolt cutters.
The solar arrays are oriented towards the Sun by one-degree of freedom Solar Array Drive Mechanisms. The orientation of the Solar Arrays is controlled by data from the Sun Acquisition Sensor supplied to the Solar Array Drive Electronics via the Attitude and Orbit Control System. The Solar Arrays were sized to generate at least 800 W in the vicinity of the Earth and they provide at least 1100 W in Venus orbit.
Power Storage
During eclipse or when spacecraft power demand exceeds Solar Array capacity, power is supplied by three 24 Ah Lithium-Ion batteries, selected because they combine low mass with high-energy efficiency.
Power Control
The Power Control Unit (PCU) supplies the spacecraft main power bus with regulated 28 VDC. Battery discharge is controlled by Battery Discharge Regulators (BDR), which are voltage boost regulators with over current protection. The batteries are charged through step-down, current controlled Battery Charge Regulators (BCR), which offer two fixed charge rates and taper charging.
If the Solar Array power exceeds the total spacecraft demand, the Array Power Regulator (APR) performs main bus regulation. The APR is a buck regulator, which sets the operating point of the array in accordance with the power demand and can accommodate a wide range of input voltages.
A Maximum Power Point Tracker monitors the array voltage and current, and limits the duty cycle of Array Power Regulator so as to ensure that the array operates at the maximum power point.
Power Distribution
The Power Distribution Unit (PDU) distributes the regulated power from the PCU to the spacecraft systems and payload. One switched and overcurrent protected power line is dedicated to each DC/DC converter in the user equipment. In addition, dedicated power lines are devoted to user devices that draw power directly from the spacecraft power bus without using a DC/DC converter, such as the thruster flow control valves.
Grounding and EMC
Venus Express employs Distributed Single Point Grounding (DSPG). The main characteristics of this concept are:
- All primary power supplies are referenced to a single point, located in the PCU
- Primary power supplies are galvanically isolated from secondary power supplies
- Secondary power supplies are referenced to the housing of the unit that they supply
- The housing of each unit is referenced to the spacecraft structure at a single point
- All return currents flow through dedicated conductors (return wire policy)
- No current intentionally flows through the spacecraft structure
The spacecraft structure is used as a low-impedance equipotential ground plane.
DSPG combines the prevention of low frequency interference provided by single point grounding with the avoidance of high frequency interference offered by multiple ground systems. Low frequency interactions caused by ground loops are avoided by isolation of the primary power from equipment housings and secondary power supplies. High frequency interference generated by capacitive coupling with the ground system is minimised by referencing the equipment secondary power supplies to the structure for each equipment unit.
As a consequence of the use of DSPG, signal and control connections between separate units are implemented as balanced differential interfaces.
Maintaining a strict control over potential noise sources ensures Electromagnetic Compatibility (EMC) between the various components of Venus Express. Radiated emissions from spacecraft components are minimised, the spacecraft structure acts as a Faraday cage up to 10MHz and the use of external harness bundles is kept to a minimum.
Propulsion
The Venus Express propulsion system is the same as the bi-propellant system employed on Mars Express, but with a higher propellant mass (~530 kg for Venus express as compared to ~430 kg for Mars Express).
The propulsion system is divided into three areas:
- High pressure gas side, comprising a 35.5 litre pressurant tank, normally open and normally closed pyrovalves, a high range pressure transducer, a fill & drain valve and a test port
- Low pressure gas side, comprising a pressure regulator, non-return valves, a pair of low flow latch valves, a low range pressure transducer, normally closed pyrovalves, test ports, and fill & vent valves
- Liquid side, which supplies propellant to the main engine and thrusters. Made up of two 267 litre propellant tanks, normally open and normally closed pyrovalves, propellant filters, low-range pressure transducers, the main engine, four pairs of reaction control thrusters, test ports and fill & drain valves
The pressurisation agent is gaseous helium, stored under high pressure. The high-pressure gas passes from the storage tank, via pyrotechnically actuated valves to start and stop the pressurisation process, and a filter, to the pressure regulator. From the regulator, the low-pressure gas passes through non-return valves and low flow level valves to normally closed, pyrotechnically actuated valves, which are opened to admit the pressurant to the fuel tanks.
The propellant tanks, one containing nitrogen tetroxide and the other mono-methyl hydrazine, supply their contents, via latch valves and flow control valves, to the thrusters. The thrusters are arranged in four pairs, located at the lower corners of the spacecraft.
The propellants are also supplied, via pyrotechnically actuated valves, filters and flow control valves, to the main engine. The main engine is located on the lower floor of the spacecraft.
The main engine generates a thrust of 415 N, while the thrusters are each capable of producing thrusts of 10 N.
Attitude and Orbit Control
As Venus Express employs fixed, high-gain communications antennas and a propulsion configuration that uses a single main engine, a high level of attitude manoeuvrability is required. Attitude manoeuvres are performed:
- Between the nadir pointing observation phase of the orbit and the Earth communication phase (see "Operational Orbit" details in the left hand navigation)
- To reach specific attitudes necessary for other science observations (for example, to enable SPICAV to make occultation observations)
- For optimisation of reaction wheel off-loading by selection of the most suitable attitude for this operation
Spacecraft attitude measurement is performed using Star Trackers and gyros, ensuring the availability of data in almost any attitude. The main constraint on attitude measurement is that the Star Trackers cannot provide data when the Sun or Venus is in or near their fields of view.
Reaction wheels are used for almost all attitude manoeuvres, providing flexibility and accuracy and reducing fuel consumption. The angular momentum of the wheels is managed from the ground using desaturation manoeuvres as required.
AOCS Hardware
The sensor components of the Attitude and Orbit Control System (AOCS) comprise:
- Two Star Trackers (STR)
- Two Inertial Measurement Units (IMU)
- Two Sun Acquisition Sensors (SAS)
Each Star Tracker has a circular field of view of 16.4 degrees and is capable of making measurements using stars of magnitude 5.5 or greater. Three axis attitude data is derived, with at least three stars always present in the field of view. The STRs incorporate a star pattern recognition function and can autonomously perform attitude acquisition. Both STRs are mounted on the face of the spacecraft most protected from solar illumination, with an angle of thirty degrees between their fields of view.
Each Inertial Measurement Unit employs three ring laser gyros and three accelerometers, aligned on three orthogonal axes. The gyros are used during attitude acquisition, for roll rate control, during the observation phase, to ensure that the required pointing performance is achieved, and during trajectory corrections, where they serve as backups for the other sensing systems. The accelerometers are used during trajectory corrections to make accurate measurements of change of velocity.
Each Sun Acquisition Sensor comprises solar cells mounted on a pyramid, which is then mounted on the exterior of the spacecraft main body. The SASs are used for pointing the spacecraft in Sun Acquisition Mode, during attitude acquisition or re-acquisition.
The AOCS uses a Reaction Wheel Assembly, comprising four reaction wheels in a skewed configuration, which enables most nominal mission operations to be performed with any three of the four wheels. By speeding up or slowing down a reaction wheel, the AOCS is able to produce a torque about the axis of rotation of that wheel and so cause the spacecraft to rotate about that axis. A change to the speed of three of the wheels allows a torque to be generated about any chosen axis.
The AOCS controls the spacecraft propulsion system, firing the 10 N thrusters to perform attitude changes that cannot be accomplished using the reaction wheels, and small trajectory corrections. The main engine (415 N thrust) is used to perform major trajectory changes.
The AOCS also provides the control inputs to the Solar Array Drive Mechanisms (SADM), which change the orientation of the Solar Arrays.
AOCS Modes
The AOCS has several sets of operating modes for different parts of the mission operations:
- Attitude acquisition and reacquisition
- Routine scientific mission operations
- Orbit control
Attitude acquisition or attitude reacquisition is accomplished using two modes. First, the Sun Acquisition Mode, using data from the Sun Acquisition Sensors, points the spacecraft X axis and the Solar Arrays towards the Sun. Then, Safe/Hold Mode completes the acquisition by establishing three-axis pointing with the main High Gain Antenna directed towards the Earth.
Routine scientific mission operations are all conducted in Normal Mode, which is also used for cruise pointing during the journey to Venus and during the attitude changes needed to orient the spacecraft before and after orbit control manoeuvres.
The trajectory correction or orbit control manoeuvres are performed through three modes:
- Orbit Control Mode (OCM), used for small trajectory corrections performed with the 10N thrusters
- Main Engine Boost Mode (MEBM), for trajectory corrections performed with the 415N main engine
- Braking Mode (BM), specifically designed for the aerobraking phase, if such a phase were necessary to achieve the final orbit, using the force produced by the air-drag when passing through the Venus atmosphere at orbit pericentre
- Thruster Transition Mode (TTM) is used to achieve a smooth transition between the thruster controlled Modes (OCM and BM) and the reaction wheel controlled Normal Mode.
Communications
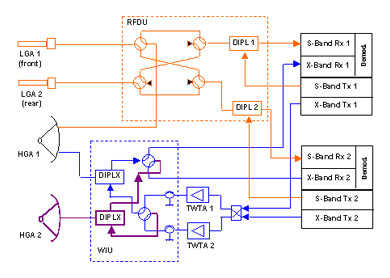
The communications comprises a Dual Band Transponder (DBT), a Radio Frequency Distribution Unit (RFDU), two Travelling Wave Tube Amplifiers (TWTA), a Waveguide Interface Unit (WIU) and four antennas.
The DBT contains two duplicate transmit/receive chains each of which has a transmitter operating in
The
The
 |
|
RF communications block diagram |
Antennas
Venus Express communicates with Earth using the following antennas:
- Two Low Gain Antennas (LGA), which allow omnidirectional transmission and reception in
S-Band - One dual band High Gain Antenna (HGA1), used for high rate telemetry transmission and telecommand reception in both S- and
X-Band s - One single band offset antenna (HGA2) used for high rate telemetry transmission and telecommand reception in
X-Band
The LGAs are the same as the antennas on Mars Express. HGA1 is similar to the HGA on Mars Express but has a smaller diameter (1.3 metres instead of 1.6 metres) to take advantage of the smaller maximum spacecraft to Earth distance. HGA2 has been added for the Venus Express mission to enable spacecraft communication requirements and thermal constraints to be met while in orbit around an inferior planet.
Operations
The LGAs were used during the Launch and Early Operations Phase (LEOP), which covered the first five days of the mission. After LEOP, during the journey to Venus, communication were in
During operational modes when VeRa is not in use, communications are performed in
When VeRa is operational, uplinks may be performed in either
Uplink
The received RF uplink signal, which is modulated with packetised telecommands as NRZ/PSK/PM data, is routed towards a diplexer, performing frequency discrimination, and then to a Dual Band Transponder input. The transponder performs carrier acquisition and demodulation, and transmits the extracted signal to the Data Handling System for further processing.
The frequencies for the uplinks are approximately 2100 MHz for
Data rates of 7.8125 bps, 15.625 bps, 250 bps, 1000 bps and 2000 bps can be received by the Venus Express spacecraft, defined by the Control and Data Management Unit design. The bit rate is selectable by means of a Memory Load Command (MLC).
As a baseline, the lower bit rates are used via the Low Gain Antennas in
Downlink
A high rate data downlink capability is required due to the large volume of data generated by the instruments. However, the downlink capacity is limited by the large spacecraft to Earth distance.
The downlink of the telemetry data to the ground stations can be performed in either S- or
Downlink is performed at a commandable, variable bit rate. The CDMU design allows the generation of a telemetry data stream at any bit rate corresponding to
The bit rate to which reference is made is the bit rate following Reed-Solomon encoding, but prior to convolutional encoding, if any. As with the uplink, the baseline is that the lower bit rates are used via the Low Gain Antennas, whilst the highest ones are used operationally through one of the High Gain Antennas in X Band.
The minimum average bit rate that has been assumed during mission design is 17 kbps, which corresponds to 500 Mb for eight hours of data downlinking per day.
The variable bit rate signal is sent to the Dual Band Transponder as:
- PCM/PSK/PM on a 8192 Hz square wave subcarrier for bit rates lower than 1365.3333 bps
- PCM/PSK/PM on a 262 144 Hz square wave subcarrier for bit rates between 1365.3333 bps and 65 536 bps
- SP-L (no subcarrier) for bit rates greater than 65 536 bps
This signal is phase-modulated in either S Band or X Band by the Dual Band Transponder.
Data Handling
The Data Management System (DMS) is in charge of
- Telecommand distribution to the whole spacecraft
- Telemetry data collection from the spacecraft systems and payload and formatting of the collected data
- Overall supervision of spacecraft and payload functions
The DMS is based on a standard On-Board Data Handling (OBDH) bus architecture enhanced by high rate serial data links connecting the Control and Data Management Unit (CDMU) processors with the Solid State Mass Memory (SSMM) and Attitude and Orbit Control System (AOCS) Interface Unit. The OBDH bus is the data route for platform and payloads data acquisition and commands distribution via the Remote Terminal Unit (RTU).
The DMS includes 4 identical Processor Modules (PM), two located in each CDMU. Two processor modules are dedicated to the DMS, and two to the AOCS. The PM selected for the DMS function acts as the bus master. It is responsible for managing the platform's communications, power, and thermal control systems. The PM selected as the AOCS computer is in charge of all sensors, actuators, High Gain Antennas (HGAs) and the Solar Array Drive Electronics (SADE). A telecommand decoder and Transfer Frame Generator (TFG) are included in each CDMU.
The Solid State Mass Memory (SSMM) is used for data storage and has a capacity of twelve gigabits. It is coupled to the two DMS processors, the TFGs, and the VIRTIS and VMC instruments. It stores science and global housekeeping telemetry packets.
The Control and Data Management Units (CDMU) control ground command reception and execution, on-board housekeeping and science data telemetry storage, and formatting of stored data for transmission. The on-board data management functions, control laws processing and execution of on-board control procedures are also performed by the CDMUs.
Data transfer with other Data Handling units is implemented using a redundant OBDH data bus and IEEE-1355 serial links. Two Interface Units connect those links with other spacecraft units. The AOCS Interface Unit deals with the AOCS sensors, reaction wheels, solar array drive and propulsion transducers and actuators. The RTU interfaces with the other spacecraft systems and the instruments.