Spacecraft
Summary
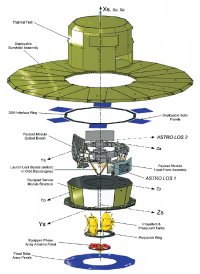
The Gaia spacecraft is comprised of three major functional modules:
 |
 |
|
Spacecraft and exploded diagram |
- The Payload Module containing the optical instrument and all electronics required to manage its operation and process its raw data. For this purpose the Payload Module includes the Video Processing Unit, the Clock Distribution Unit (housing the atomic clock references) and the Payload Data Handling Unit in charge of data storage between two downlink sessions
- The Mechanical Service Module made of all mechanical, structural and thermal elements supporting the instrument and the spacecraft electronics. In addition, the mechanical SVM comprises:
- Micro-Propulsion system
- Deployable sunshield
- Payload thermal tent
- Solar arrays
- Harness - The Electrical Service Module offers support functions to the Gaia payload and spacecraft for pointing, electrical power control and distribution, central data management and Radio communications with the Earth
The spacecraft's micropropulsion system for the fine attitude control will be one of two alternatives: proportional cold gas, or FEEP. A final decision on which of the two will be implemented is made with the Preliminary Design Review.
Mass Budget
| Component | Estimated Mass |
| Payload Module | 524 kg |
| Service Module | 868 kg |
| Spacecraft dry mass total | 1392 kg |
| Micro propulsion propellant | 59 kg |
| Propellant | 237 kg |
| Launch mass | 1934 kg |
| Launch Vehicle Adapter | 95 kg |
| Total launch mass | 2029 kg |
Power and Energy
The 12.8 m² triple-junction solar array provides up to 1910 W under end-of-life worst case conditions.
| Component | Power |
| RF Communications | 326 W |
| Data Management and AOCS | 103 W |
| Electrical power & solar array | 117 W |
| Propulsion (biliquid & micropropulsion) | 24 W |
| Thermal control | 0 W |
| SREM | 2.6 W |
| Payload module | 627 W |
| Total required power | 1561 W |
| Solar array capability | 1910 W |
Payload Module
The payload consists of a single integrated instrument that comprises three major functions. In the earlier spacecraft designs, the three functions were distributed over three separate instruments. Now the three functions are built into a single instrument by using common telescopes and a shared focal plane:
- The Astrometric instrument (ASTRO) is devoted to star angular position measurements. ASTRO provides the five astrometric parameters:
- Star position (2 angles)
- Proper motion (2 time derivatives of position)
- Parallax (distance)
- The Photometric instrument (Photometric Path) provides the star flux in 14 spectral bands, intended for astrophysics and for ASTRO chromaticity calibration
- The Radial Velocity Spectrometer (RVS) provides radial velocity and high resolution spectral data for the wavelength range 847-874 nm (near-infrared)
Each function is achieved within a dedicated area on the focal plane. Afocal elements are located close to the focal plane for the photometric and spectroscopic functions, providing dispersion of the star's spectrum along the scan. This allows both functions to take benefit from the two viewing directions and from the large ASTRO aperture, and to operate in densely populated sky areas. RVS is implemented as a grating plate, combined with four prismatic spherical lenses. This allows the necessary dispersion value to be met while correcting most of the telescope aberrations.
 |
|
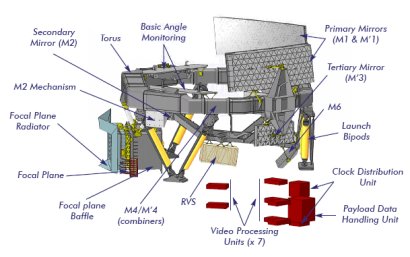
Annotated diagram of the Payload Module |
Design
The payload design is characterised by:
- A dual telescope concept, with a common structure and a common focal plane. Both telescopes are based on a three-mirror anastigmat (TMA) design. Beam combination is achieved in image space with a small beam combiner, rather than in object space as was done in the Hipparcos satellite. This saves the mass of the beam combiner, simplifies the accommodation and eliminates the directional ambiguity of the detected targets
- The use of silicon-carbide (SiC) ultra-stable material for mirrors and telescope structure, provides low mass, isotropy, thermo-elastic stability and dimensional stability in a space environment. This allows to meet the stability requirements for the basic angle between the two telescopes with a passive thermal control instead of an active one
- A highly robust Basic Angle Measurement system
- A large common focal plane shared by all instruments.
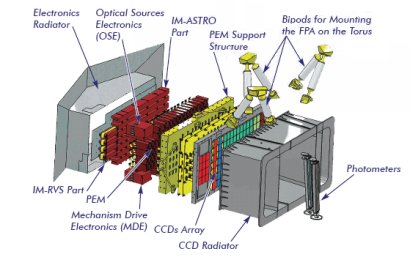
Focal Plane
The Gaia focal plane will be the largest ever developed, with 106 CCDs, a total of almost 1 Gigapixels and physical dimensions of 0.42m x 0.92m. The 106 detectors are distributed over the focal plane as follows:
| Star Detection | 14 detectors | 2 x 7 sky mapper (SM) CCDs, 7 per telescope |
| ASTRO | 62 detectors | |
| Photometry | 14 detectors | 7 red and 7 blue |
| RVS | 12 detectors | 2 are operated in a specific non-binned mode |
| Metrology and Alingment | 4 detectors | 2 wave front sensors (WFS), 2 basic angle monitoring (BAM) CCDs |
The focal plane is passively cooled to 170 K for reducing its sensitivity to radiation.
 |
|
The focal plane assembly |
Metrology
A five-degrees-of-freedom static mechanism is implemented behind the secondary mirrors of the two TMA telescopes for securing the optical performance in orbit and cancelling static residual errors due to mirror micro-settings and gravity release.
The Basic Angle Monitoring (BAM) system consists of a Fizeau interferometer, measuring fluctuations in the basic angle between the two telescopes.
Time Reference
Star localisation measurement is performed by transit detection and time measurement, which calls for a very accurate datation of object transits. For this purpose, a Clock Distribution Unit (CDU) provides all necessary timing signals and clock functions for video sample time tagging and ground based time scale correlation. All signals are generated on the basis of the highly stable central master 10 MHz Rubidium atomic clock.
On-board Payload Processing
The Payload Data Handling System (PDHS) is implemented as a set of 7 parallel processing units feeding a common solid state mass memory. The processing part of the PDHS has a modular architecture which follows the focal plane assembly architecture and eases the accommodation. In the case of failure of one channel, this would have little impact on the science performance. The file-organised mass memory is a standard stand-alone unit.
On-board data processing algorithms allow computations to be made in real time, without data buffering. The hardware-software share offers full flexibility and algorithms may be modified in-flight following first in-orbit results.
Service Module
 |
|
Exploded diagram of mechanical and electrical service modules |
Mechanical Service Module
The mechanical service module is optimised so as to guarantee the stability of the basic angle, necessary to meet science requirements. It comprises a flat and uniform deployable sunshield, payload thermal tent filtering. The payload module and service modules will decouple in-orbit through the payload module bipod release mechanism.
Electrical Service Module
The electrical service module design is driven by the science performance (attitude control laws with the hybridisation of star tracker and payload measurements, high rate data telemetry, regulated power bus for thermal stability).