No. 52 - SMART-1 Mission Operations Until Moon Impact
If the current orbit is allowed to continue without further correction the spacecraft will impact the lunar far side away from ground contact and visible observations. To allow scientists to observe the impact a series of perilune raising manoeuvres are required to shift the impact location to the lunar near side and a date of 3 September 2006. In total a delta-velocity (Δv) of ~12 ms-1 is required to achieve this result.
 |
|
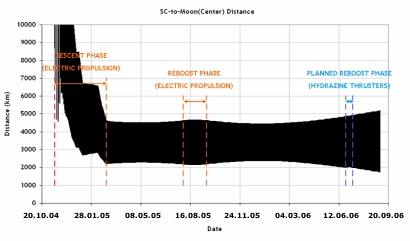
Plot of the spacecraft-to-Moon-centre distance from capture to impact. The current reboost phase is marked in blue. |
Current Spacecraft Status
All SMART-1 subsystems are nominal and are expected to continue functioning properly until the Moon impact. There will be operational thermal constraints for both the spacecraft platform and payloads at low Moon altitudes.Mission End Activities
The selected mission scenario for an impact with the lunar surface on 3 September 2006 will require special manoeuvres with the attitude hydrazine subsystem to raise the orbit by around 90 km. It is no longer possible to reboost the orbit using the Electric Propulsion System since all Xenon reserves were used in the previous reboost phase. The adjustments will be made so as to maximize the scientific and observational requirements.The initial state prior to perilune raising manoeuvres, on 19 June 2006:
- Radius of perilune: 2016 km (Moon radius = 1738 km)
- Radius of apolune: 4820 km
- Inclination: 90.7°
- Right ascension of ascending node: 239.4°
- Argument of perilune: 226.3°
- Xenon left: 0.260 kg (0.060 kg usable with special operations => 1.6 m s-1)
- Hydrazine left: 5.8 kg (out of 8.09 kg at launch)
The current plan for the perilune raising manoeuvres comprises:
- 74 revolutions with about 3 hours of intermittent thrust centred at apolune
- Thrust direction along the velocity with some in-plane tilt when away from apolune
- Slew duration to re-orient X-axis = 15 minutes; rate = 0.22° s-1
- Total ∆V: 11.8 m s-1
- Total hydrazine usage: 2.5 kg
- Total perilune raising: 90 km
- Total duration: 16 days + 3 days (halt for orbit determination and ∆V calibration)
- Start date: 19 June 2006 05:23:44 UTC
- End date: 7 July 2006
- Slots for trim: 26-28 July 2006, 25 August 2006 and 1 September 2006
- Current impact time prediction: 3 September 2006 01:26 UTC
AOCS
In the next three months until impact, AOCS operations will be nominal except for the series of ∆V manoeuvres that will be executed using the hydrazine subsystem in order to raise the perilune altitude.
 |
|
Illustration of part of the reboost strategy: series of reaction wheel offloadings that transfer spacecraft angular momentum between the spacecraft +Y and -Y axis, generating a small ∆V in the direction of flight (to the right). |
Payload
The only constraint on payload operations in SMART-1's final orbits is a routine one associated with the need to download the data generated onboard the spacecraft. This requires that the MGA be pointed at the Earth - which prohibits any payload specific pointing at that time. Payload operations will also be suspended during the pericentre raising ∆V manoeuvres scheduled for June/July.
Thermal
The operations of the thermal subsystem will continue as normal until impact and there are no constrains or special operations planned.
Timeline of Events
| Date | Activity |
| May | Manoeuvres preparation |
| 13 June | Remove solar array 35° offset |
| Mid June | SMART-1 perilune height <300 km; platform constraints |
| 19 June | Start of perilune raising manoeuvres; payload activities stopped |
| 5 July | SMART-1 Ground Operations Automation System (GOAS) real time demonstration at ESOC |
| 7 July | End of manoeuvres |
| 8 July | Resume payload operations |
| ~20 July | SMART-1 perilune height <200 km; platform and payload constraints |
| 26-28 July | Trim manoeuvres to adjust time of Moon impact |
| Mid August | SMART-1 perilune height <100 km; platform and payload constraints |
| 1 September | Last trim manoeuvre |
| 3 September | Real time Moon impact; World observatories coordination from ESOC Last observations |
| 5 September | SMART-1 press conference at ESOC |
Orbital Information
The interactive diagrams below show SMART-1's orbit evolution from 19 June to 3 September, plus details on the projected final orbit. In addition details for the adjacent two orbits of the nominal impact orbit are given.
Around impact, the perilune distance reduces by 1.2 km per revolution. Clementine LIDAR (Laser Image Detection And Ranging) data are used for the Moon topography. The accuracy of this data ranges from 100 m at the measurement points to 2 km in-between the Clementine ground tracks.