Selecting a landing site for Rosetta's lander, Philae
This was the decision of the Landing Site Selection Group (LSSG) following a relatively short – 6 weeks – but intense period of investigation and assessment of the comet surface.
The LSSG is composed of engineers and scientists from Philae’s Science, Operations and Navigation Centre (SONC/CNES), the Lander Control Centre (LCC/DLR), scientists representing the Philae Lander instruments, and the ESA Rosetta team.
So how did the choice of Agilkia as the landing site for Philae come about? Since comet 67P/Churyumov-Gerasimenko had never been seen up close, a meaningful selection could only be made once the spacecraft was close enough to be able to characterise it.
In this context, characterising the comet meant determining the shape, rotation rate and orientation, gravity field, albedo (reflectivity), surface features and surface temperature of the nucleus. It also meant measuring outgassing and quantifying the density and velocity distribution of particles in the coma, the envelope of gas and dust surrounding the comet nucleus.
The selection of the landing site was a race against time in a brief window of opportunity, and a balance had to be found between competing needs. The comet's activity is driven by the increase in heat as it heads closer to the Sun every day. The lander must be deployed before this activity rises to levels that could jeopardise a safe landing.
On the other hand, the landing cannot take place too early because there must be sufficient sunlight for Philae's solar cells to generate enough power to operate the lander in the weeks after landing. Also, the surface temperature should be suitable for the lander to operate: not to cold or too hot.
Combined, these factors dictate that the landing should take place when the comet and Rosetta are about 3 Astronomical Units (450 million km) from the Sun – this is where the comet will be by mid-November.
Those involved in the selection process made the best use of the limited time following the rendezvous on 6 August to gather critical data and make informed decisions.
As the distance between Rosetta and the comet decreased rapidly between May and August, the onboard scientific and navigation cameras began to resolve the comet and identify features on its surface. Rosetta's other instruments are also beginning to 'sense' the comet's environment in more and more detail as the spacecraft draws close.
 |
| Early views of comet 67P/C-G on 14 July 2014, revealing its characteristic shape and the two distinct lobes. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA |
In July 2014, images from the OSIRIS cameras began to reveal the shape of comet 67P/C-G. By the time the spacecraft arrived at the comet in August, it was clear that the comet is a complex double-lobed structure with a ‘head’ and a ‘body’ separated by a neck – a distinctive shape that has added to the challenges involved in selecting a safe landing site.
The first step in the selection process was to gather the crucial technical information needed by the LSSG to identify suitable candidate landing sites.
At this stage, the primary driver was whether or not landing on a given site would be technically feasible, independent of scientific desirability.
'Feasibility' is based on many factors relating to where a site is on the comet. Some of these are specific to the descent phase after Rosetta has deployed the lander: its duration and the illumination conditions and radio communications with Rosetta during descent.
Others relate to the conditions at touchdown, such as the speed at which the lander reaches the site, the slope of the surface and the orientation of the lander.
The physical nature of the site was also an important factor: aspects such as the presence of large boulders or deep crevasses on the surface, and the suitability of the topography of the landing site for the science experiments were taken into account.
Periodic communications between the lander and the orbiter must be maintained as much as possible during the lander's First Science Sequence (FSS; the first intensive phase, lasting about 3 days) and its Long Term Science Sequence (LTS; up to about March 2015).
There must also be a balance between comet day and comet night to cater for the scientific needs of the instruments, as well as ensuring that the solar cells can recharge the battery to power the lander instruments, while not overheating the lander.
Finally, sites should allow for operations of the CONSERT experiment, which requires radio signals to be transmitted between the orbiter and lander through the body of the comet.
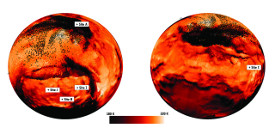 |
| VIRTIS measurements of the comet's surface temperature are among the essential observations used in the landing site selection process. Credit: ESA/Rosetta/VIRTIS/INAF-IAPS/OBS DE PARIS-LESIA/DLR |
The scientific value of the potential sites was also taken into account. To help judge this, essential observations were made by Rosetta's scientific instruments, in particular OSIRIS, MIRO, and VIRTIS, with additional contributions from Alice and ROSINA, and from the navigation camera, NAVCAM.
NAVCAM and OSIRIS images were used not only to model the shape and rotation of the comet. They also allow the flight team to compute the spacecraft's trajectory and so deduce the comet's gravitational field. MIRO and VIRTIS measurements of the comet's surface temperature will be used to predict the temperature at the comet three months into the future, during lander operations. Measurements from MIRO, VIRTIS, ROSINA and Alice of the pressure and density of gas surrounding the nucleus will be used to indicate the environment in which the spacecraft will be operating.
Scientific measurements of the comet surface and environment were also gathered by other orbiter experiments. These were also used in assessing the scientific merit of the candidate sites.
A preliminary selection of 10 landing sites, referred to by the letters A to J, was made by a subset of the LSSG, meeting on 20 August, just two weeks after rendezvous. For each of these sites, the LCC and the SONC carried out a technical analysis that was presented at the first full meeting of the LSSG, on 22-24 August.
At this meeting, participants reviewed the results from the technical analysis and discussed the scientific merits of the candidate sites. By the end of the meeting, the group selected five of the sites (A, B, C, I and J) for detailed investigation.
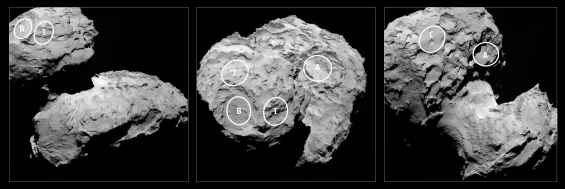 |
| The five Philae candidate landing sites selected for detailed investigation, shown on three different views of the comet. The sites were assigned a letter from the original pre-selection of 10 possible sites identified A through J. Three sites (B, I and J) are located on the smaller of the two lobes of the comet and two sites (A and C) are located on the larger lobe. Credits: ESA/Rosetta/MPS for OSIRIS Team MPS/UPD/LAM/IAA/SSO/INTA/UPM/DASP/IDA |
Between 25 August and 13 September, the ESA Rosetta Mission Operations Centre (RMOC) at ESOC carried out a comprehensive analysis to identify possible trajectories to deliver the lander, and to confirm that the proposed landing sites could be reached with the required accuracy.
During this period, more detailed measurements were taken from the orbiter, as it approached to within 30 km of the comet's centre.
At this stage the shape model of the comet was generated with a resolution of 3.6m on the surface of the comet and 0.5m in elevation. The model was used to simulate a view of the horizon as seen from Philae's panoramic cameras, which was also factored into the selection of the primary site.
At the second meeting of the LSSG, on 13-14 September, the latest data were scrutinised. Technical aspects, such as flight dynamics analyses for the orbiter and the lander, and scientific aspects, for example, new measurements from orbiter instruments, were considered. The possible landing scenarios and their implications on the science programme of the lander were discussed.
Finally, the remaining candidate sites were ranked. Site J, situated on the smaller lobe, was selected as the primary landing site, and Site C, on the larger lobe, as the backup site.
From 16 September to 11 October, detailed analysis and operational preparation for the landing took place. During this period the spacecraft was close enough to the comet to allow the OSIRIS Narrow Angle Camera to map the boulder distribution at the primary and backup landing sites.
On 12 October the LSSG met to make the crucial Go/NoGo decision for Philae to land on the primary site.
While the primary site coordinates define the location where the lander is envisaged to land, the actual landing can take place within a landing ellipse measuring some hundreds of metres across. The precise dimensions of the actual landing area will depend on a number of factors, including the precision with which the orbiter’s location is known at the time the lander is released and on where along the delivery trajectory the lander is released. In preparation for this Go/NoGo meeting, OSIRIS delivered its high resolution images and information about the distribution of boulders on the primary and backup landing sites which were used as an input to the risk analysis. This information served to support slight adjustments to be made to the target coordinates within the landing area with the aim to reduce the overall risk of landing in a section which has a higher fraction of boulders. Final scientific measurements from orbiter instruments were also used to support the risk analysis, although these were not considered as an essential part for the Go/NoGo decision.
Final scientific measurements from orbiter instruments were also be used to support the risk analysis, although these were not be considered as an essential part for the Go/No Go decision.
Two days later, on 14 October, the formal Lander Operations Readiness Review took place, to give the official go-ahead for the landing.
Then from 13 October to 3 November the SONC and LCC prepared the final operational sequences for the Separation, Descent and Landing (SDL) and First Scientific Sequence (FSS) operations of Philae.
IIn parallel, the spacecraft operators at ESOC prepared the command sequences for the deployment of Philae onto the surface of comet 67P/Churyumov-Gerasimenko. Due to the extremely high precision required for this manoeuvre, the spacecraft’s trajectory and commands will be continually updated as the days count down. The final separation and landing sequence will only be transmitted to Rosetta a few hours before separation.
Then, the world waits. The landing, currently planned for 12 November, will take place entirely automatically.
Key dates
| 19 August | Due date for all data needed for the Landing Site Selection Group (LSSG) meeting of 20 August |
| 20 August | LSSG meeting to pre-select up to 10 candidate sites: Lander Control Centre (LCC) and Science Operations and Navigation Centre (SONC) carry out technical analysis |
| 22-24 August | Meeting of LSSG to select a maximum of five of the candidate landing sites; Coordinates of sites are sent to Rosetta Mission Operations Centre (RMOC) |
| 25 August | Delivery of OSIRIS Digital Terrain Models of the candidate sites |
| 5 September | RMOC experts report on first analysis of landing sites |
|
|
Meeting of LSSG to select primary and backup landing sites; Landing Site coordinates are sent to RMOC |
| 23 September | Delivery of OSIRIS high-resolution images and boulder distribution file for primary and backup landing sites |
| 26 September | RMOC report on final analyses and operational scenario of primary landing site |
| 12 October | Meeting of LSSG for final Go/No Go decision primary landing site |
| 14 October | Lander Operations Readiness Review |
| 7 November | Final landing sequences are sent from LCC to RMOC |
| 9 November | Final landing sequences are uploaded to the Lander |
| 12 November | Date of landing |